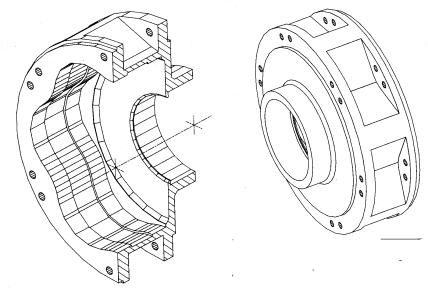
L'étude porte sur un
mécanisme de moteur hydraulique à pistons radiaux, équipant certains poids
lourds ou engins de génie civil. La figure 1 ci-dessous montre le principe de
fonctionnement d'un moteur de ce type.
|
Il est constitué d'un rotor (2) lié au bâti (1) par une pivot de centre A. Dans ce rotor sont usinés 10 logements radiaux équidistants recevant les ensembles pistons (3) et galets (4). Ces derniers sont au contact d'une rampe à six ondulations, usinée dans le carter (1). La mise en communication de la chambre du vérin (3)/(4) avec l'alimentation (haute pression) lorsque AB augmente ou avec le réservoir lorsque AB diminue provoque la rotation du moteur. Le couple sur l'arbre de sortie lié au rotor (2) dépend du nombre de pistons du moteur, de la pression d'alimentation et de la géométrie du mécanisme. |
Figure 1 :
Schéma cinématique du moteur hydraulique |

Un distributeur est chargé:
· d'alimenter chaque vérin pendant la phase ou la distance de
l'axe de son galet à l'axe de rotation du moteur s'accroît (phase motrice);
· d'assurer le retour au réservoir du fluide dans les phases
d'échappement.
L’étude proposée ci-dessous est réalisée en deux étapes
successives:
·
définition du contour
de la came, par construction de l'enveloppe d'un cercle représentant l'outil de
génération du profil;
· étude statique du mécanisme limité à un vérin, après
description des liaisons et efforts.
-1- Mécanisme de génération du profil
-1-1- Construction du schéma
Cette première
modélisation correspond à la génération du profil de came, telle qu'elle est
obtenue lors de la phase d'usinage, grâce à la cinématique de la machine-outil.
L'outil est circulaire, figuré par un cercle de rayon 62,5 mm, lié et excentré par rapport au satellite 3 d'un train épicycloïdal, également constitué du porte satellite 2 et de la couronne planétaire liée au bâti 1.
On se propose dans cet exercice d'étudier la forme de la rampe ondulée, à partir de son mode de fabrication.
|
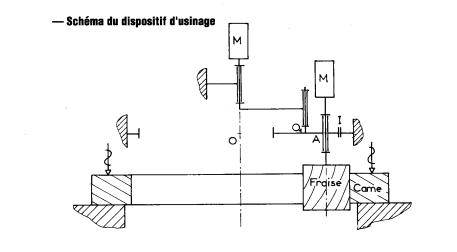
Figure 1 : Mécanisme générateur
du profil |
Le schéma ci-contre définit la
cinématique de la machine destinée à usiner la rampe. L'élément (4) est une fraise de centre C, de rayon
R, liée au pignon (3) par une liaison pivot et entraînée par un moteur
électrique non représenté. Le pignon roule sans glisser en I sur
une couronne dentée fixe par rapport au corps de la machine. Le pignon est
entraîné par le bras (2); celui-ci est lié au carter (1) par une pivot de
centre A et au pignon (3) par une pivot de centre B. |
Notations:
|
|
|
|
|
En position initiale: |
Les rayons de la couronne et du satellite sont respectivement égaux à 25 et 150 mm, de rapport égal à 1/6.
-1-2- Description des pièces
Les pièces seront numérotées conformément au schéma de la
figure 1. Le cercle figurant la fraise 4 sera affecté à la pièce 3.
La représentation est limitée aux entités significatives
pour définir les liaisons.
-1-3- Description des liaisons
Les liaisons entre ces pièces sont les suivantes:
|
N° liaison |
Type |
Centre |
Pièces |
Particularités |
|
1 |
Articulation |
(0, 0) |
1 - 2 |
|
|
2 |
Articulation |
(0, 125) |
2 - 3 |
|
|
3 |
Roult
sans glissement |
(150, 0) |
1 - 3 |
R p1=150,
Rp3=25 |
-1-4- Analyse cinématique
Procéder à une analyse géométrique et cinématique du
système ; vérifier ses propriétés de mobilité et d’isostatisme.
Définir les conditions de mouvement de 2 par rapport à 1
dans la liaison 1 permettant de déterminer les positions successives du
mécanisme, pour une amplitude de 360°, soit un tour, avec un intervalle
angulaire de 2°.
Consulter la trajectoire d’un point quelconque appartenant
au satellite 3 dans son mouvement par rapport au bâti 1. Constater que cette
trajectoire est fermée et énoncer la condition géométrique permettant d’obtenir
cette propriété.
-1-5- Génération de l'enveloppe
Définir les points de l'enveloppe appliquée au cercle
générateur de rayon 62,5 de la pièce 3 (fraise), dans son mouvement par rapport
à 1, correspondant au premier quadrant du repère général. Analyser l’influence
du paramètre BC = e sur la forme de l’enveloppe en affectant à ce paramètre les
valeurs successives 5, 10, 15 et 20 mm.
Retenir pour la suite la valeur e = 15 mm.
A ce stade de l'étude, Il est possible d'envisager la création d'un mécanisme cinématiquement conforme au moteur réel, limité à un seul vérin.
-2- Mécanisme du moteur POCLAIN
-2-1- Création du schéma
Les entités (segments et arcs de cercles) constituants les
pièces 2 et 3 sont effacées, et le schéma du moteur est créé, constitué de
quatre pièces:
·
le bâti 1 duquel ne
subsiste que les segments représentant l'enveloppe construite précédemment;
·
l'arbre moteur, corps
de vérin 2;
·
le piston de vérin 3;
· le galet et son support 4.
-2-2- Description du profil de came
L'enveloppe préalablement construite et insérée dans le
schéma est utilisée pour créer le profil de came affecté au bâti 1.
Cette came est de type polaire, de centre (0, 0). Les points
du profil sont acquis par l'utilisation d'une fenêtre. De cette façon est créé
le profil sur un intervalle angulaire [0,2p].
Nota bene :
dans l’espace géométrique du mécanisme, les points d’un profil de came polaire
sont définis par leurs coordonnées cartésiennes : M (xM, yM).
Dans l’espace géométrique de la courbe définissant le profil, les axes
représentent respectivement l’angle polaire ?M et le rayon polaire ?M
du point M du profil.
-2-3- Description des liaisons
Les liaisons entre ces pièces sont les suivantes:
|
N° liaison |
Type |
Centre |
Pièces |
Particularités |
|
1 |
Articulation |
(0, 0) |
1 - 2 |
|
|
2 |
Glissière plane |
(120, 0) |
2 - 3 |
Directeur (1, 0) |
|
3 |
Ponctuelle |
(80, 0) |
3 - 4 |
Normale (1, 0) |
|
4 |
Glissière |
(120, 0) |
3 - 4 |
Directeur (1, 0) |
|
3 |
Came polaire à
galet |
(150, 0) |
3 - 1 |
|
-2-4- Analyse du mécanisme
Procéder à une analyse cinématique du mécanisme et vérifier en particulier son degré de mobilité.
-2-5- Description des efforts
Les efforts mis en jeu dans le moteur sont les suivants:
·
un effort connu,
variable, lié en position à la pièce 3, appliqué à cette même pièce et fonction
de la rotation dans la liaison n° 1 entre l'arbre 2 et la bâti 1.
Cet effort est décrit pour un intervalle angulaire de 90°, la période de
fonctionnement du moteur étant de 60°.
Pour 0° < q < 30°, l'effort est supposé nul, le distributeur mettant le vérin
au refoulement, c'est à dire à une pression supposée nulle;
pour 30°
< q
< 60°,
le distributeur alimente le vérin et l'effort est supposé constant, égal à 500
N;
pour 60°
< q
< 90°,
l'effort est à nouveau nul.
Pour tenir compte des délais d'ouverture des orifices d'alimentation et
refoulement, les délais nécessaires au passage de l'effort de la valeur 0 à la
valeur 5000 N et inversement sont supposés correspondre à un parcours de 10° de l'arbre du
moteur.
·
le second effort est
un effort inconnu de type couple, agissant sur l'arbre 2 du moteur et supposé
représenter l'action du récepteur; d'éventuelles composantes de la résultante
suivant x et y, nécessairement connues, ne sont pas considérées ici, car ne
travaillant pas au cours du mouvement.
-2-6- Analyse statique et résultats de l'étude
Procéder à une nouvelle
analyse du mécanisme et observer en particulier les résultats relatifs à son
caractère iso-hyperstatique.
·
Il
est possible de suivre le mouvement du moteur et de vérifier le maintien du
contact du galet sur le profil de came.
·
Il
est possible de consulter les valeurs des efforts extérieurs appliqués au
moteur:
-
effort du vérin, donnée statique de l'étude;
- moment du couple résistant sur l'arbre de sortie.